En procesamiento de imágenes, un kernel o máscara de convolución es una matriz pequeña que se utiliza para aplicar efectos como desenfoque, detección de bordes, realce, etc.
El kernel se desplaza sobre cada píxel de la imagen y realiza operaciones matemáticas con los píxeles vecinos para calcular un nuevo valor.
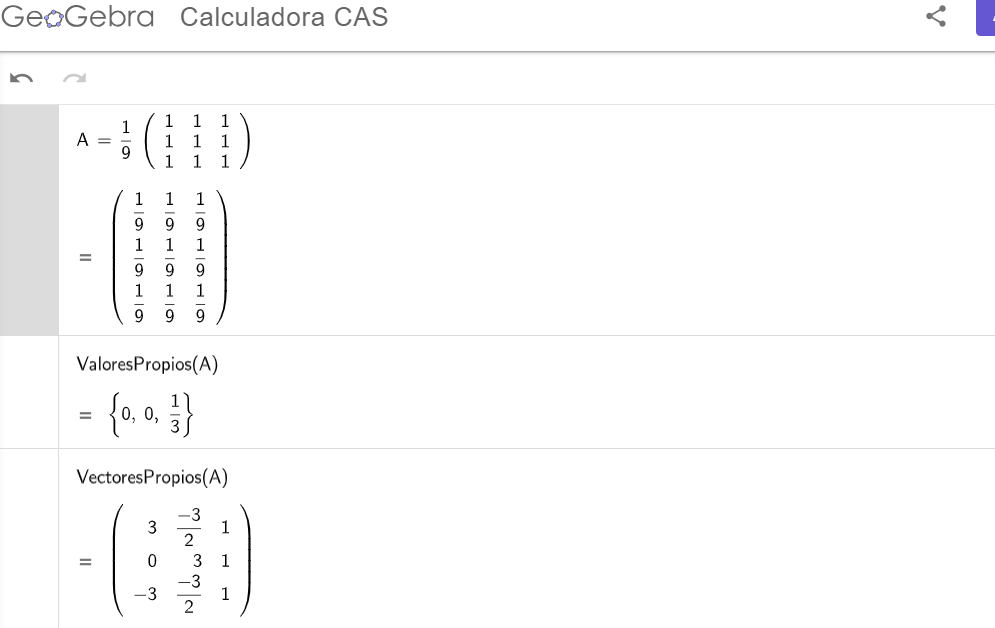
En este seminario trabajaremos con un kernel de promedio 3×3, que produce un efecto de desenfoque (blur) al reemplazar cada píxel por el promedio de sus vecinos.
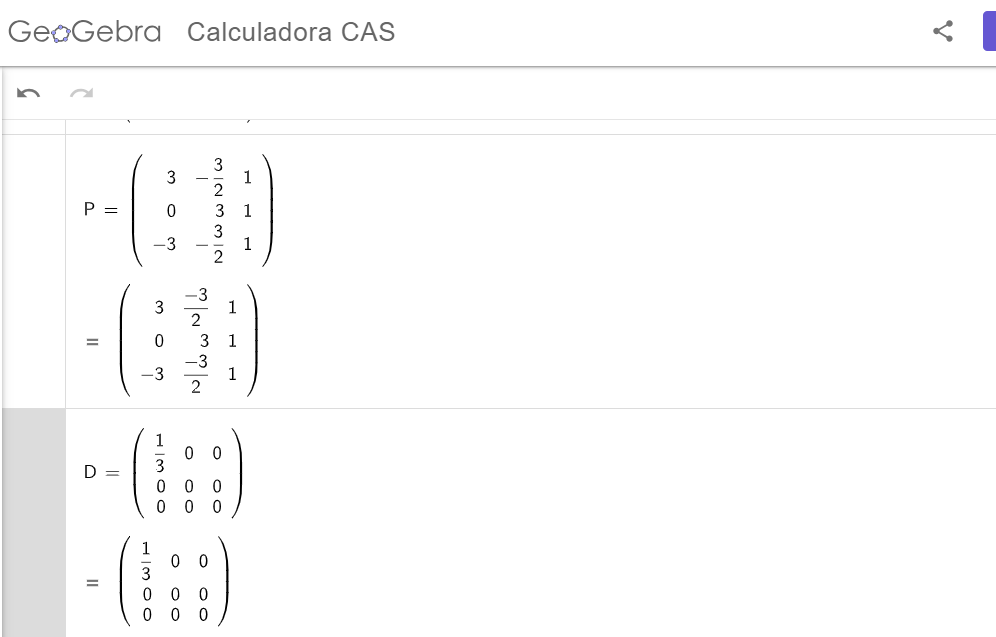
La diagonalización de matrices permite simplificar el cálculo de potencias de kernels, haciendo más eficiente la aplicación repetida del filtro.